Summary The human forearm enables movements like writing and swinging a racket
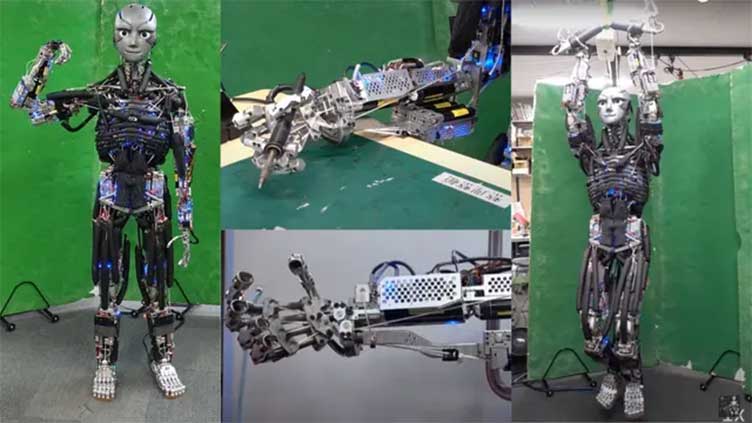
(Web Desk) - Researchers have developed a robotic forearm that mimics human body proportions, weight, muscle arrangement, and joint performance to optimize its benefits.
A team at the JSK Lab at the University of Tokyo created two muscle motors that were integrated into a single module, maximizing space with shared components. This module also serves as the bone structure.
Additionally, miniature motors were utilized, and a method was developed to dissipate motor heat through the bone structure.
According to the researchers, these approaches led to the development of a forearm with a radioulnar joint that mirrors human proportions, weight, muscle arrangement, and joint performance.
Tasks like soldering, book opening, and badminton swings were performed, demonstrating the robot’s ability to execute skillful, human-like motions using the radioulnar structure.
Recent years have seen vigorous development in humanoid robots, starting with ASIMO, which mimics human movement with two arms and legs.
Research has expanded to tendon-driven musculoskeletal humanoids that replicate human body proportions, joint structures, drive systems, and muscle arrangements to analyze and achieve human-like motion.
While many studies focus on duplicating human joint structures, few have explored the radioulnar joint in detail. Existing models with this joint use pneumatic actuators, which have limitations in control and muscle arrangement.
Due to muscle arrangement constraints, the human forearm’s radioulnar structure, composed of the radius and ulna, is challenging to replicate in robots. Previous tendon-driven humanoids, like Kojiro and Kenzoh, struggled to achieve accurate joint structures.
To address this, a new miniature bone-muscle module was developed, integrating two actuators into the bone structure, optimizing space, and improving proportional accuracy.
The module uses miniature motors with efficient heat dissipation to maintain high muscle tension. Additionally, an ultra-compact tension measurement unit was created, reducing volume by 39 percent.
According to researchers, the innovative approach allows for the linear connection of muscle modules, enabling a more accurate and maintainable radioulnar structure for next-generation tendon-driven humanoids.
The human forearm consists of two long, thin bones called the radius and the ulna, which form the radioulnar joint. This joint allows for unique human movements, like writing, turning a doorknob, and swinging a racket.
To replicate this in robots, researchers developed a compact forearm with a radioulnar joint using miniature bone-muscle modules. The design mimics human proportions, with two modules in the radius and ulna, totaling eight muscles. These muscles control six degrees of freedom (DOFs), including the radioulnar joint, radiocarpal joint, and finger movements.
The module’s compact design maintains the correct body proportions and weight ratios while offering more muscle-driven freedom than other robots.
The researchers successfully created a forearm that closely mirrors human joint performance, allowing for precise, skillful movements similar to those of a human.
Researchers tested Kengoro, a robot equipped with a human-mimetic radioulnar forearm, by performing tasks like soldering, opening a book, turning a screw, and swinging a badminton racket.